I recently discovered the Flyfish-tech FF32 device, which fulfills some functionality that I've wanted for a long time - easily interfacing programs on my Windows machine (Python scripts) with low-level communications (I2C, SPI, bit banging, ADC). This sort of thing can also be accomplished with FTDI chips but there's some extra go-betweens with the serial communcation, so I was very excited to find these parts. Unfortunately, the Python examples provided are meant to run under Linux, and it took me the better part of a day messing around with it to get it to operate under Windows. I'm writing this quick post as a guide for anyone else who might attempt this so they can avoid the same frustration. I've checked that this method works in Windows 7 and Windows 8 with Python 3.4.3 with the FF32 on firmware v0.5. I am a complete beginner with both Python and USB, so this may be obvious to others; it's written for the self-taught people like me who don't have a clue until they slog through hours of trial and error.
Reinstall Python and check the box in the installer to add python.exe to the PATH variable. This is the only option in the installer that's not defaulted to yes, so I hadn't checked it the first time I installed. I'm sure there's an easier way of getting this added if you already have Python, but uninstalling and starting over was quick and easy (and makes sure you have an updated copy of Python).
Open the Windows command prompt (run cmd.exe) and type "python -m pip install pyusb" to install pyusb automatically. This was an adventure in itself for me just working out how to install Python modules...
Download libusb-win32 to get a very useful utility called inf-wizard.exe, which shows up in the bin folder after extracting.
Plug in the FF32 and let Windows do its automatic installation stuff - it's a generic HID so it's quick and easy
Run inf-wizard as administrator (recent versions of Windows have become a real pain trying to save users from themselves...). Pick the FF32 from the list of devices. Write down the two hex values for Vendor ID and Product ID. Keep clicking through to create a .inf file and save it somewhere. On the last screen click Install Now. If it doesn't install successfully, you probably didn't run as administrator.
Use the Python examples from Flyfish as a reference only and don't even try to run them with Windows, they have to be entirely rewritten to work with pyusb. Sometime soon I'll get around to doing that and post them.
Write your script like this to get pyusb to work with the FF32. This is just a very quick example that I got working - there's lots to do to package the functions up nicely. Note the use of the Vendor and Product IDs that we wrote down earlier:
This project was an anniversary gift for my wife. The 5th
is traditionally a wood gift, so I had eventually settled on this concept of a
small wooden box, but it had to have something extra. I had been thinking about
secret locking mechanisms for a while and then decided that an automatic
opening would be better, especially if the box were designed so that it
couldn’t really be opened without activating the mechanism. I ordered some ¼”
pieces of walnut on eBay and then started working out the design while I waited
for them in the mail.
The first thing to work out was the actuator to
open it. I went through a lot of concepts – direct gear drive of the hinge
joint, rotary cam, cable reel and spring return – and found flaws with all of
them, finally settling on a crank arm mechanism. I have used these little gear motors
in a lot of previous projects so I had some lying around. I interfaced the
motor with a larger gear to get extra reduction and to get the long radius
needed while still making motor mounting easy. I went through a few iterations
of the motor and gear assembly until I got to one I liked. This is cut from
aluminum extrusion (actually a square tube I had, cut into an angle) and uses
#2-56 tapped holes to mount the large gear, the motor hold-down, and the limit
switch. The large gear has a nylon washer and a short aluminum bushing over the
screw so that it can turn easily.
I also started on the electronics, for which I planned to
use a PIC16F1824 and a HG7881 H-bridge (or maybe it’s L9110S, I’m getting these
from eBay so the sources aren’t exactly reputable). The PIC outputs two lines
to the H-bridge and gets two limit switch inputs, as well as the user input
(still undecided at this point in the project). I put together some basic code
to run the motor in one direction until one switch closes, and then go back
until the other one does. Everything was running but I was a bit concerned
about quiescent current drawn by the H-bridge during sleep, since this will
have to sit idle for many years on battery power.
Once I had that much together, I went forward
with the design of the box. I would have liked to use finger joints in the
corners but I’m seriously lacking in woodworking tools and experience, so the
corners are simply overlapped. I did the design in solidworks, which allowed me
to print out patterns for the cuts, but more importantly allowed me to work out
the mechanism measurements ahead of time. I modeled up the gear and motor
assembly and put them in place, then tweaked the length of the arm link and the
pivot location on the lid to get the right extents of lid motion. During this
process I had the great realization that with a properly designed mechanism, I
could run the motor in only one direction for both opening and closing and
ditch the H-bridge. This saves on both complexity and standby power. To accomplish
this, I tweaked the linkage design until the limits of lid motion were just
beyond where I wanted, and printed out a guide to set the lengths when I built
it.
I also printed my patterns for all the wooden pieces. Once
the wood arrived in the mail, I cut them out and glued them to the walnut
pieces.
I actually ended up making a complete box (no mechanism) which I had to
reject because the wood got a bit too damaged by my handsaw and left nicks in
the finished product, but it was a good test of the design and of the finish I
planned to use (linseed oil).
I started on the final version, switching to a hacksaw to make the cuts more gradually.
I then brought the edges up to final dimension on the belt sander. For external corners, I left some extra material so that they could be sanded flush after assembly.
Following another lesson learned from the prototype box, I
glued this one up in two separate steps instead of all at once. I also needed
some time with the front panel off to debug the mechanism, so the first glue
step joined the bottom, sides, and back.
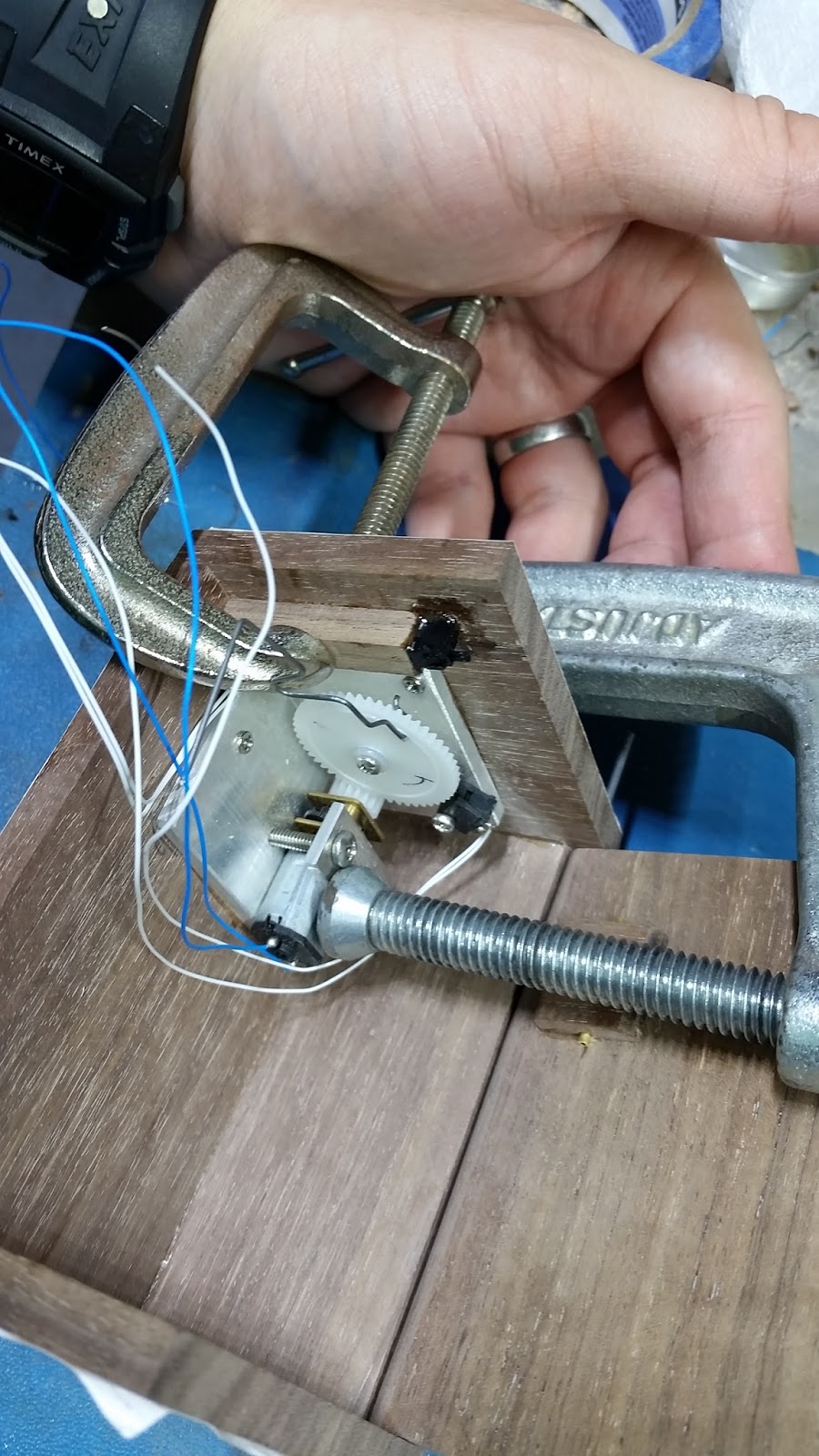
The mechanism was finished off by adding the limit switch to
detect the open condition. It does this by contacting the protruding end of the
wire link that comes through the back side of the nylon gear. I then mounted
the mechanism inside with epoxy and two small wood screws. I then added a post
to hold the limit switch which detects the lid closing and glued that in.
From
here I moved on to completing the lid. As usual I continued to add complexity
in the middle of a project, and decided to try doing an inlay. To start this, I
sketched a heart shape and cut it out of a thin piece of cherry. I then clamped
that piece down on the center of the lid and carefully traced it with an x-acto
blade to make a score line.
With
the inlay piece removed, I gradually cut on the score line to deepen the cut,
followed by angled cuts to remove a wedge of material around the edge of the
shape.
Finally, I used a small chisel to scrape out the inside of
the shape and flatten the bottom of the pocket. The cherry inlay was then glued
in, with some saved walnut sawdust mixed into the glue in an attempt to match
the surrounding color at the glue joint. After the glue dried I sanded this
flush and the inlay was complete.
To
finish the lid, I drilled in the holes for the hinge pins, and added a
full-width fillet to the bottom edge in the back so the hinge could rotate. Finally,
the pivot for the wire link went on (a small brass tube held down by a block of
wood), as well as an extra block to prevent the wire slipping out of the tube
as it tended to do. The last step on the lid was to add two small holes hidden
in the back that give access to the ends of the hinge pins. This is so that
they can be popped out in case the mechanism or battery fails and get the box
open.
I could then complete the entire mechanism by bending the
wire link. This took a few tries to get perfect. The link is a complex part
that needs to contact the limit switch, pivot in a hole in the gear, bend out
to avoid colliding with the gear screw, and include a u-bend to serve as a
spring before finally making a 90-degree bend to go into the pivot on the lid.
The spring section is critical to allow the box to fully close: the linkage is
designed to pull the lid slightly below horizontal, at which point the u-bend
section opens up to put tension on the lid holding it firmly in place. It also
allows compliance in the case that something gets jammed so the mechanism won’t
destroy itself (the motor is geared down low enough that it has enough torque
to destroy the gear if it is completely stopped).
During all this work I had been thinking about how to get
input from the user to trigger the mechanism. I wanted it to be fairly hidden,
so the options I thought of were: capacitive sense pad behind the wood (too
much standby power), wooden inlay-like button (too hard to make it look good),
or knock sensor. A knock sensor (using a piezo element) seemed like the only
reasonable option. I originally wanted it to be on the lid, as knocking on the
top of the box would be more natural to the user, but this left the problem of
how to tell it to close when the lid was up vertical. The compromise was to put
the knock sensor in the front panel and use that to trigger both opening and
closing. The sensor I used was just the piezo element removed from a buzzer, as
they can be used in reverse to convert compression into electrical signals.
The first version of the front panel simply squeezed the
piezo element between the front panel and an inset brace piece behind it. The
brace had a small circle milled out so that it only contacted the inner section
of the piezo , and the inner section was planed down a bit to fit the thickness
of the piezo. I drilled holes to get the wires out and then glued these two
pieces together.
At
this point I finalized the firmware and could test everything with the complete
electrical system connected. It all worked, but it became clear that the knock
sensor was not nearly sensitive enough – I had to hit it quite hard to trigger,
and even then it was with the brace piece flat on the bench, not fixed at its
edges like it would be once mounted in the box. The concept I came up with to
fix it was to make a new front panel with a very large pocket milled out of it,
so that the majority of the area is very thin wood that can flex easily.
This took a few attempts as I don’t have a mill or router,
and ultimately I had to do most of the work with a chisel. The brace piece goes
against this as before, but now there needed to be an extra pedestal piece to
raise the piezo element up to meet the front panel. This new arrangement worked
perfectly to detect knocks, and has an additional advantage that I realized too
late to use in this project but could do if I ever build another: there’s a
large hollow cavity inside the front panel which could be used to hide all the
electronics.
With
the knock sensor all working and the front panel completed, I wired up the
microcontroller (dead bug style on top of the aluminum motor mount) and did a
final system test before gluing the front panel in place.
At this point I hadn’t fully planned where to mount the
battery holder, but I got really lucky and discovered that it could sit
perfectly on top of the flat aluminum piece that clamps the motor down, and use
one of the motor clamp screws to hold it in place. Finally I glued in a small
piece of wood to divide the box so that the mechanism is kept separate from the
usable area.
After
some tweaking of the lid fit to get the mechanism to run smoothly, I did the
final sanding. This started on the belt sander to get all the pieces flush, and
then finished by hand on increasing grits of sandpaper. The linseed oil finish
was then applied to all outside surfaces and allowed to dry. After cleaning it
up I also lined the bottom of the pocket with a piece of felt. Once it was all
done, I did some final checks of standby current, motor run current, and a
check of the voltage drop after a few days of standby. And it’s done!